
















導入
自動車業界は技術革新を迎えており、先進運転支援システム (ADAS) や自動運転車がますます普及しています。これらのイノベーションの中心となるのは、現代の車両の「目」として機能する車載カメラです。これらは、安全性の向上、ナビゲーション用のリアルタイム データの提供、自律的な機能を有効にします。
多くの人は、自動運転車を、疲れることなく楽々と目的地まで運転できます。、通勤時間を仕事に使えるようにし、リラクゼーション、娯楽に充てることができる乗り物として想像しています。しかし、車載カメラはその高度な機能を備えるにもかかわらず、その性能と信頼性に影響を与える多くの課題に直面しています。
このビジョンを実現するには、これらの車両のセンサー システムが、時間帯、気象条件、照明、道路状況に関係なく、確実に機能する必要があります。
この記事では、ADAS と自動運転車の要件によってもたらされる課題を検討し、VVDN Technologies がカメラ技術の専門知識を活用してこれらの課題にどのように対処するかを探ります。
車載カメラの種類
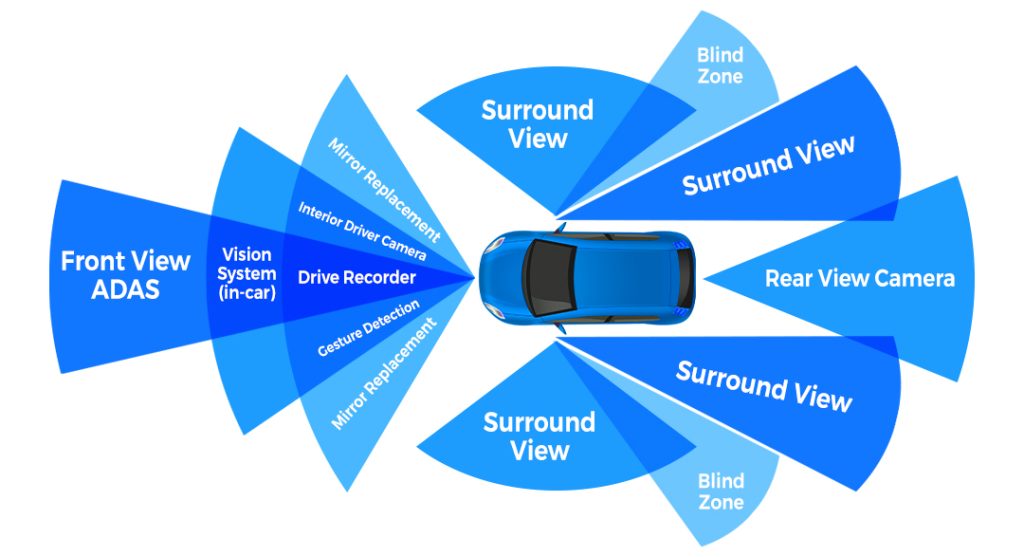
- リアビューカメラ: 車両の後ろ部に設置されており、これらは、車両の後方のエリアをはっきりと見ることができるため、ドライバーが後退したり駐車したりする際に役立ちます。
- サラウンドビュー カメラ: これらのシステムは、車両の周囲に配置された複数のカメラからの画像を組み合わせて 360 度のビューを作成し、駐車支援や狭いスペースでの操縦を可能にします。
- 前向きカメラ:前向きに配置されたこれらのカメラは、車線維持支援、交通標識認識、衝突回避などの ADAS 機能にとって重要です。
- ドライバー監視カメラ: これらのカメラはドライバーの注意力と警戒心を監視し、眠気や注意力散漫の兆候を検出して安全性を高めます。
- 電子ミラーカメラ: これらのカメラは、普通のサイドミラーを高度なデジタル ディスプレイに置き換え、厳しい気象条件でも視認性を向上させ、ブラインドスポットを減らします。
- ナイトビジョンカメラ: 赤外線テクノロジーを利用して、これらのカメラは暗い場所での視認性を向上させます。標準のヘッドライトでは見えない歩行者、動物、その他の障害物の検出に役立ちます。
車載カメラの挑戦
- 汚染: カメラのレンズは、汚れ、水、その他の汚染物質によって妨げられることがあります。解決策には、必要な場合に開く保護カバーや、フロントガラスのワイパーの後ろにカメラを配置することが含まれます。
- 車線検出:車線区分線の認識は、見た目の似た構造、地域的な違い、色、気象条件の違いなどにより困難です。
- 軽度のアシスト: 動いている車両と街灯や反射板などの静止物体を区別することは、特に部分的に欠陥のあるライトやオートバイを扱う場合には複雑です。
- ハイダイナミックレンジ (HDR):直射日光、トンネルの出口、対向車のヘッドライトなどの極端な照明条件では、カメラの視認性が低下します。
- ちらつき: 最新の LED 光源はさまざまな周波数でちらつき、車載カメラに必要な連続画像分析を複雑にしています。
- 迷光: コントラストが高いと、レンズやカメラのハウジング内で不要な反射や光の散乱が発生し、視認性の問題が発生する可能性があります。
- 環境要因:カメラは、あらゆる温度 (-40 ~ 100 °C) および気象条件 (雨、霧、雪) において確実に動作する必要があります。画像ノイズは温度とともに増加し、パフォーマンスに影響を与えます。
- 地域差: 交通標識や道路標示は地域によって異なるため、カメラがこれらの違いを認識して適応する必要があります。
- 無数のオブジェクト: オブジェクトの多様性とその視点の変化により、正確な分類と検出には大きな課題が生じます。
車載カメラの限界
カメラには、次の 3 つの特定の領域において固有の制限があります。
- 1. 視野
- 2. 正確な深度認識 (>20m)。
- 3. 霧、雨、低照度条件下での視認性。
これらの制限に対処するために、高度に自動化された車両には追加のセンサーが組み込まれています。
- LiDAR: 正確な 3D マッピングと距離測定を提供し、物体検出と空間認識を強化します。
- レーダー: 特に悪天候時に、堅牢な物体検出と正確な距離測定を提供することでカメラを補完します。
- 超音波センサー: 近距離の検出に使用され、特に駐車支援システムに役立ちます。
- 熱画像カメラ: 生きている物体や加熱された物体を検出するために使用され、見通しの悪い状況で歩行者や動物を識別することで安全性を高めます。
課題を克服するためのソリューション
- 高度なアルゴリズム: 機械学習や AI を含む高度な画像処理アルゴリズムを実装し、さまざまな条件下での物体の検出と認識を向上させます。
- センサー フュージョン: 複数のセンサー (カメラ、レーダー、LiDAR) からのデータを統合して、車両環境をより正確かつ包括的に理解します。
- 堅牢な設計: レンズの障害を防ぎ、画質を向上させるために、保護ハウジング、自動クリーニング機構、およびより優れた光学設計を備えたカメラ システムを設計します。
- 強化されたキャリブレーション技術: カメラのアライメントをリアルタイムで調整し、衝撃や振動の後でも精度を維持する自動化された動的なキャリブレーション システムを開発します。
- データ統合: 複数のカメラとセンサーからのデータを組み合わせて、車両の周囲を包括的に理解します。
これらのソリューションに加えて、車両に取り付ける前に高品質のカメラ出力を確保するには、他のいくつかのパラメータを最適化する必要があります。これらには次のものが含まれます。
- OECF(Opto Electronic Conversion Function))の測定
- ノイズ
- 球面収差を含む解像度。
- ホワイトバランス
- エッジの強度と色の暗さ
- 色収差
- ストレイライト
- 色の再現。
- センサー上の欠陥ピクセルと異物
- ちらつき
VVDN のカメラ技術に関する専門知識
VVDN Technologies は、自動車を含むさまざまな業界向けのカメラの設計と開発で 10 年以上の経験があり、ソフトウェア設計、ハードウェア設計、機械設計、テスト、検証、製造を含めて包括的な社内機能を提供しています。世界クラスの ISP チューニング ラボを備えた VVDN は、最高品質のパフォーマンスを保証するために厳格な客観的および主観的なテストを実施します。 AI/ML モデルの設計と統合を専門とする VVDN は、LiDAR、RADAR、熱センサー、IR、UWB、超音波センサーからのデータを組み合わせるセンサー フュージョン アルゴリズムの専門知識を持っています。
VVDN Technologies は、深い業界経験と包括的な社内機能および最先端のテクノロジーを組み合わせることで、最高の性能と信頼性基準を満たす高度な車載カメラ ソリューションを提供します。
当社の製品の詳細を知り、お客様のカメラ要件を満たすためにどのように協力できるかについては、info@vvdntech.com までお問い合わせください



